GAMES101学习笔记(一) - 变换、光栅化与几何
本文最后更新于 2024年9月3日 晚上
漫漫长路。
变换
基本变换
缩放
\symbf{S}(s_x,s_y,s_z) =
其中,为轴方向上的缩放倍数。
当缩放倍数为负数时,相当于在对应的轴上做了翻转。
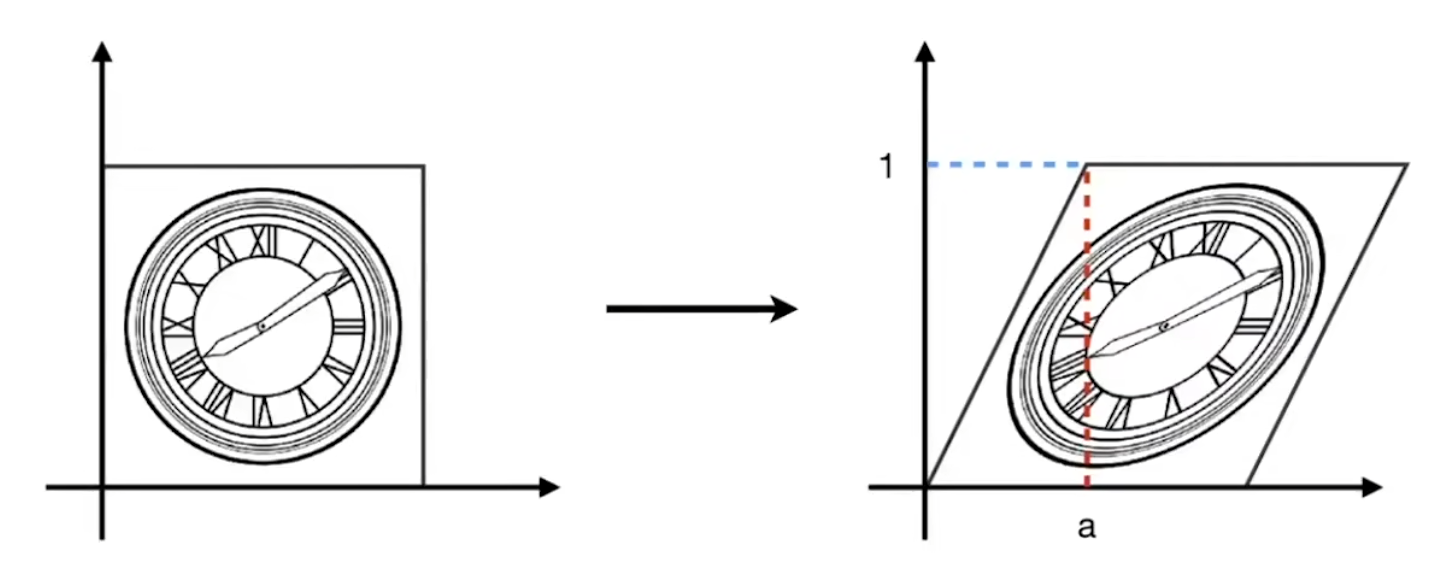
切变
切变(Shear)操作可以改变物体的形状。
=
旋转
对于二维物体,绕原点逆时针旋转度:
=
如果想绕任意一个点旋转,可以将该变换分解为三步:
- 平移到原点
- 绕原点旋转
- 平移到原来的位置
相反地,顺时针旋转度等价于逆时针旋转度,其变换矩阵为:
=
可以看出,反方向的旋转变换矩阵等于正方向变换矩阵的转置,即。
同时,根据定义,正方向旋转变换矩阵的逆矩阵就是反方向旋转变换矩阵。由此可以推出,对于旋转变换矩阵,其转置矩阵与逆矩阵相同,因此旋转变换矩阵是正交矩阵。
对于三维空间:
\symbf{R}_x(\alpha) = \begin{bmatrix}1&0&0&0\\0&cos\alpha&-sin\alpha&0\\0&sin\alpha&cos\alpha&0\\0&0&0&1\end{bmatrix}
\symbf{R}_y(\alpha) = \begin{bmatrix}cos\alpha&0&sin\alpha&0\\0&1&0&0\\-sin\alpha&0&cos\alpha&0\\0&0&0&1\end{bmatrix}
\symbf{R}_z(\alpha) = \begin{bmatrix}cos\alpha&-sin\alpha&0&0\\sin\alpha&cos\alpha&0&0\\0&0&1&0\\0&0&0&1\end{bmatrix}
简记:绕哪轴,哪不变,xz应用2D矩阵,y2D转置。
由于在右手坐标系中,y轴正方向由z叉乘x得到,因此符号相反。
欧拉角:\symbf{R}_{xyz}(\alpha,\beta,\gamma) = \symbf{R}_x(\alpha)\ \symbf{R}_y(\beta)\ \symbf{R}_z(\gamma)
罗德里格斯旋转公式(Rodrigues’ Rotation Formula):给定一个角度和一个轴,得到变换矩阵:
\symbf{R}(\symbf{n},\alpha) = cos(\alpha)\symbf{I} + (1-cos(\alpha))\symbf{nn}^T + sin(\alpha) \begin{bmatrix}0&-n_z&n_y\\n_z&0&-n_x\\-n_y&n_x&0\end{bmatrix}
其中,I是单位矩阵;sin(α)后的矩阵实际上是向量n的叉乘矩阵表示。
该公式默认轴n过原点。若要绕任意轴旋转,可以先将目标点平移到原点,然后用此公式生成变换矩阵。
平移
\symbf{T}(t_x,t_y,t_z) =
齐次坐标
齐次坐标(Homogeneous Coordinates)用于实现平移变换。
齐次坐标会给n维的点或向量增加一个维度,用于实现平移变换。其中,点的分量固定为1,而向量的分量固定为0(因为向量平移没有意义)。以二维坐标为例:
= =
分量要么是0,要么是1,分别代表着向量和点。这一性质在向量和点之间的加减运算后仍然保留,例如向量+向量=向量(0+0=0),向量+点=点(0+1=1)等。
对于大于1的分量,我们引入定义:
在齐次坐标系中,代表点,其中≠0。
在没有齐次坐标的情况下,我们可以用下面的表达式表示平移:
= ·+
该变换称为仿射变换(Affine Transformations)。
所有仿射变换都可以表示为齐次坐标。
逆变换
逆变换矩阵就是原变换矩阵的逆矩阵。
变换组合
由于矩阵没有交换律,所以变换矩阵的顺序十分重要。
存在多个矩阵同时与向量相乘时,先应用的是最靠近向量的变换矩阵,以此类推。
组合的顺序为:先缩放,再旋转,最后平移。
观测变换
观测变换(Viewing Transformation)包含了视图变换(View Transformation)和投影变换(Projection Transformation)。
视图变换
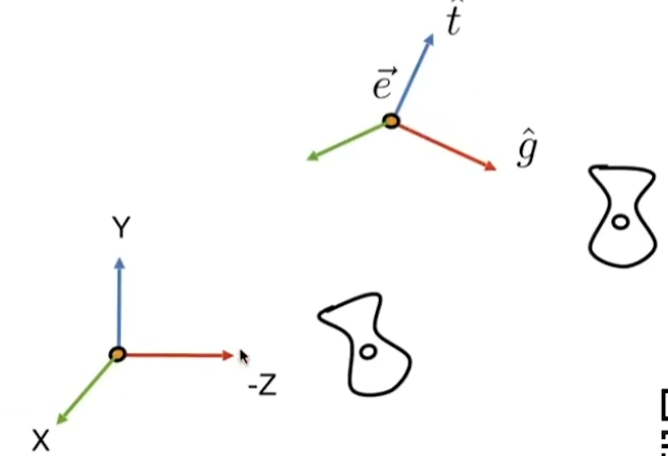
首先确定定义相机所需的参数:
- 位置
- 朝向向量
- 上方向 (影响相机本身在世界空间内的旋转)
我们约定,根据相对关系,相机永远处于原点,面向Z轴负方向,以Y轴正方向为上方向。视图变换所做的是让其他物体移动,而非让相机移动。
我们可以将视图变换矩阵拆解为下面几个变化:
- 将位置变换到原点:
- 旋转朝向向量到z轴负方向
- 旋转上向量到y轴正方向
可以看出,该变换包含一次平移与两次旋转,两次旋转可以合并为一个旋转变换,所以有:
其中,
直接求取旋转矩阵较为困难,但我们可以将x、y、z轴变换到相机坐标系,然后求变换的逆。
对于该变换,我们将其乘以(1,0,0,1),可以得到向量(x_{g×t},0,0),即相机坐标系的x轴。对于原y轴和z轴的单位向量,乘以该矩阵以后也能变换到对应的坐标轴。
由于旋转矩阵是正交矩阵,所以其逆矩阵就等于转置矩阵。因此,有:
所以,我们可以得到,
投影变换
投影分为正交(Orthographic)和透视(Perspective)。
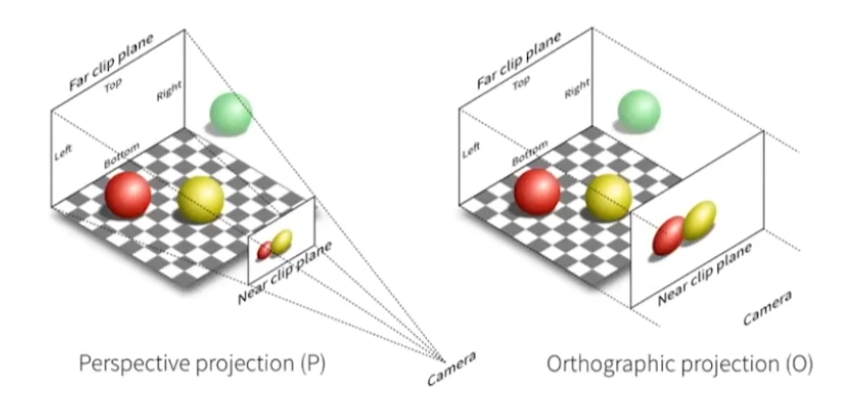
正交投影
本质上是将左右范围为[left, right],上下范围为[bottom, top],前后范围为[near, far]的立方体映射到正侧(Canonical)立方体[-1, 1]^3上。
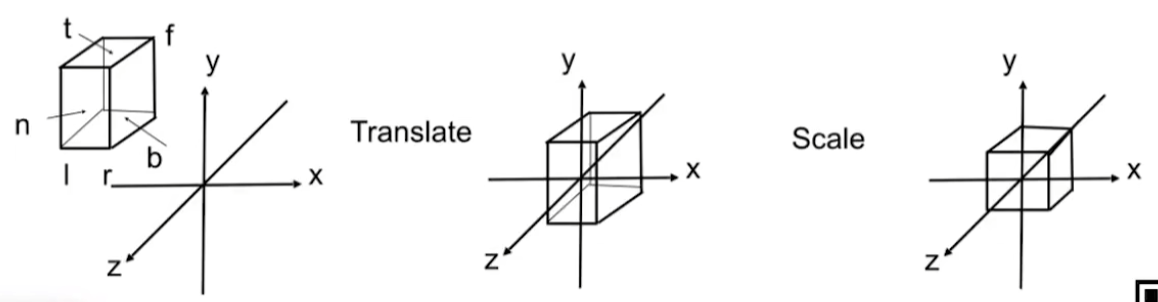
先平移,后缩放:
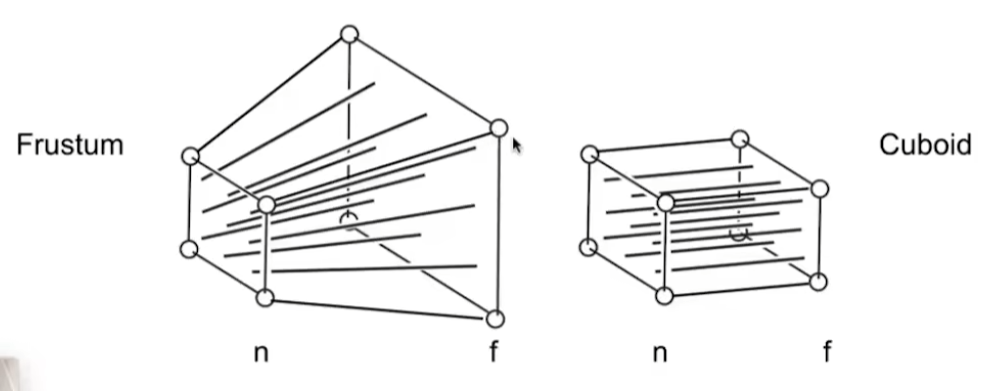
透视投影
通俗理解透视投影,可以将透视变换分为两步:首先,将Far plane “挤压”,使其大小与Near plane一致,这样Frustum就变为了立方体;随后,进行正交投影。
根据相似三角形,我们可以得到:,
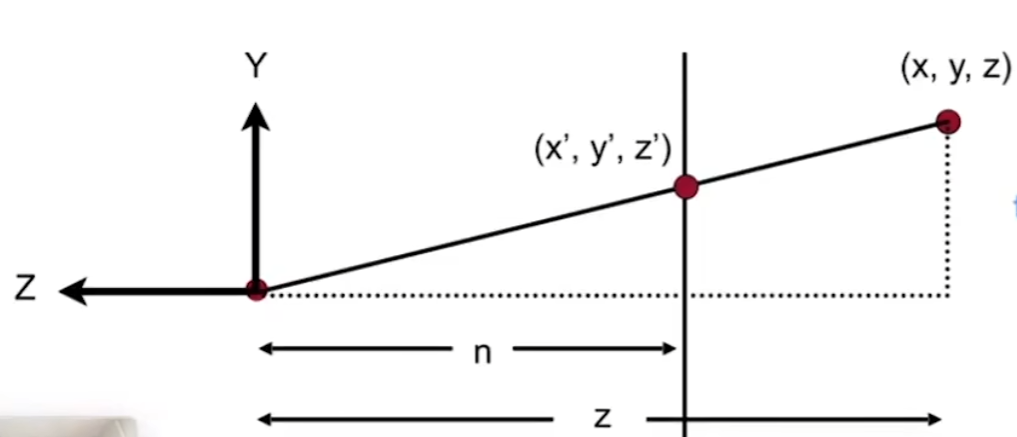
我们知道,在齐次坐标中,有:(x,y,z,w)等价于(x/w,y/w,z/w,1)。由于进行投影后深度信息丢失,而我们需要深度信息进行深度测试,所以我们让w分量等于原来的深度值z,则有:
根据上述向量变换规律,我们可以写出部分变换矩阵:
为了推导z’,我们选择一个特例:位于近平面的一个点(x,y,n,1)。经过变换,它应当等价于(nx,ny,n^2,-n)。因此,我们知道变换后的z与x,y都没有关系。
此外,远平面的中心点(0,0,f,1),经过挤压后仍然是(0,0,f,1),等价于(0,0,f^2,f)。我们可以列出方程组:
解得
因此,
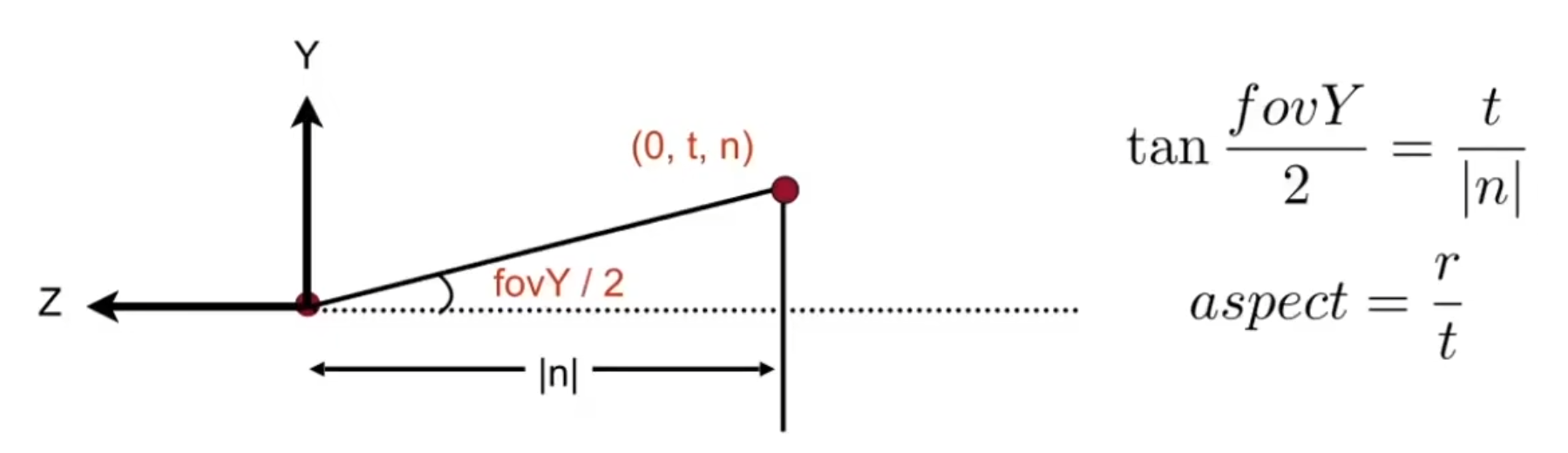
常见的情况下,我们不会直接得到l、r、t、b,而是使用垂直视场角和屏幕宽高比推导出这四个参数:
光栅化
屏幕是一个光栅成像设备(Raster Display Device),它由一个像素(Pixel)数组构成。像素是一个个拥有一致颜色的小方块,它的颜色是由红、绿、蓝三色混合而成的。屏幕像素数组的大小被称为分辨率(Resolution)。
光栅化(Rasterize)通俗来讲,就是将几何体画在屏幕上的过程。
视口变换
屏幕空间(Screen Space)以屏幕为基准,定义了一套坐标系。一般而言,屏幕左下角为原点,向上为Y轴正方向,向右为X轴正方向。
我们使用整数对来描述像素坐标,横坐标为像素左边的像素数,纵坐标为像素下方的像素数。像素(x,y)的中心点实际上位于(x+0.5,y+0.5)。
为了将NDC范围[-1,1]映射到屏幕范围[0,width] [0,height],我们对NDC坐标做如下变换:
该变换被称为视口变换(Viewport Transformation)。
三角形
三角形是最基础的多边形,任何多边形都可以被分解为三角形。三角形具有以下独特性质:
- 三角形上的所有点都处于同一平面
- 三角形的内外分明,不会出现凸、凹多边形的情况
- 三角形的三个顶点的顶点属性确定时,内部任意一点的顶点属性都能通过插值得出。
我们使用采样(Sampling)的方式将三角形光栅化为屏幕上的像素:
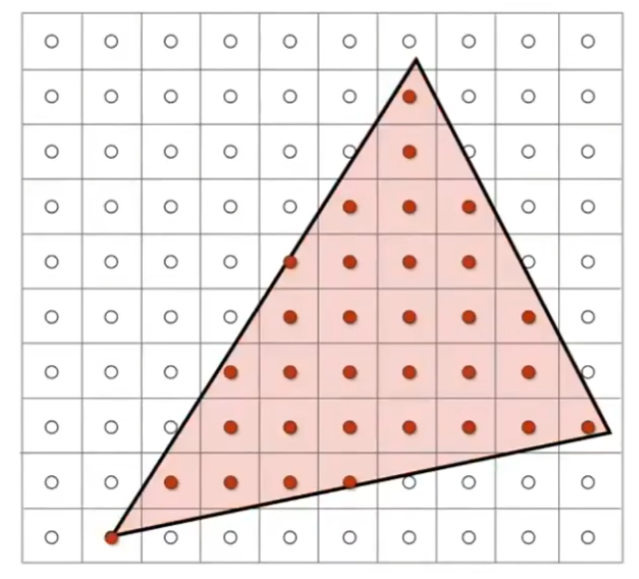
一种简单的方法是,遍历屏幕上每个像素的坐标,若坐标(x+0.5),(y+0.5)位于三角形内部(使用叉乘同号判断),则该像素设置为三角形颜色。
注意点:
- 叉乘时,按照一定的顺序构造向量。如P1,P2,P3,构造时便是P1-P2与P1-Q叉乘,P2-P3与P2-Q叉乘,以此类推,不能中途反过来。
- 当点位于三角形边的时候,有一次叉乘会是0。这种情况,既可以不做处理,也可以特殊处理。
如果对于每个三角形,都遍历屏幕上的所有像素,性能消耗较大。因此,我们为每个三角形设置一个包围盒(Bounding Box ,又称Axis-Aligned Bounding Box,轴向包围盒,AABB),包围盒由三个顶点的坐标定义,每次遍历仅遍历包围盒内部的像素。

反走样
由于一个像素只能显示一种颜色,光栅化后的三角形会出现锯齿化边缘。这种现象被称为走样(Aliasing)。优化这种现象的技术被称为反走样技术(Anti-Aliasing)。
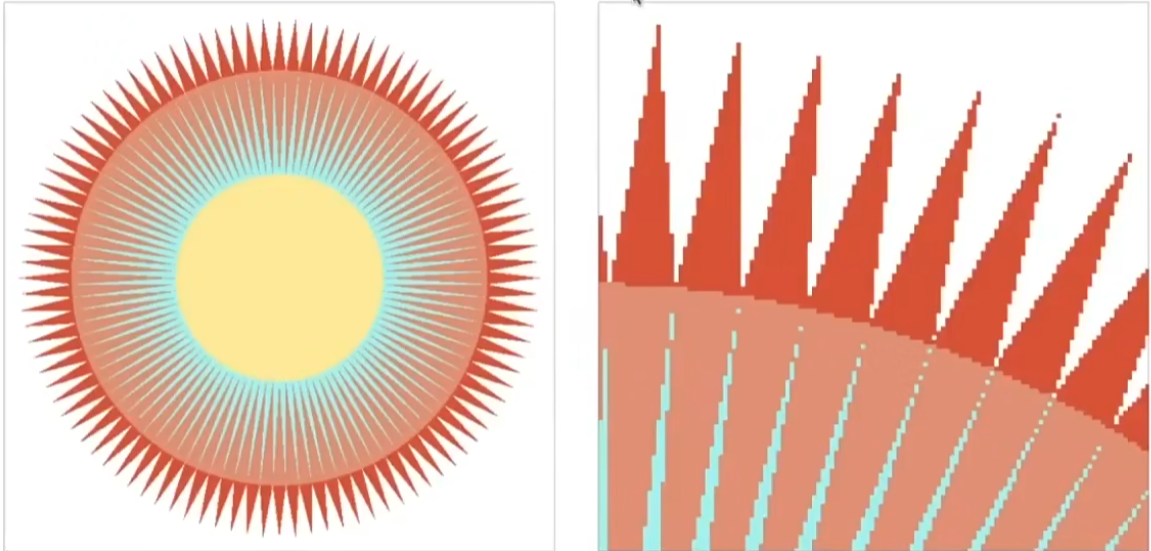
瑕疵(Artifacts)泛指图形学中的一切错误显示现象。走样是瑕疵的一种。除此之外,还有摩尔纹、车轮效应等瑕疵。这些瑕疵都是采样导致的。
走样本质上是“信号变化太快,采样速度太慢”导致的。
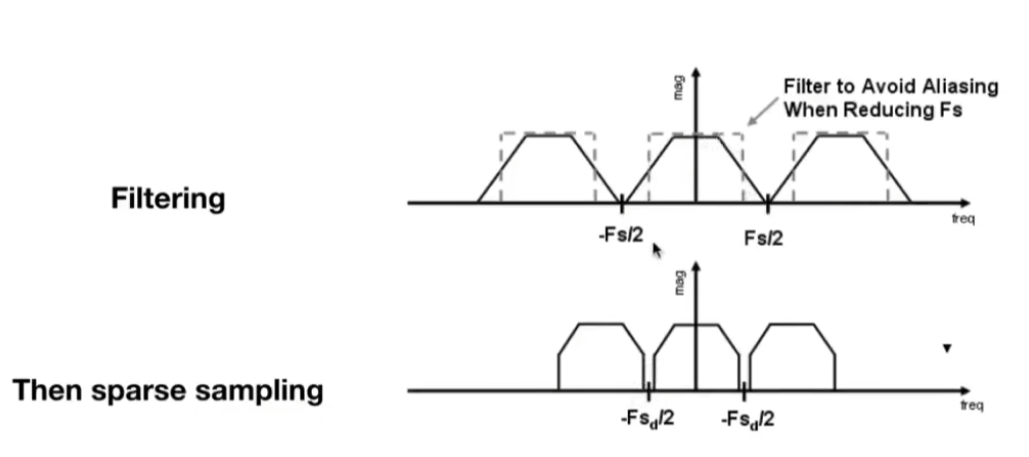
在光栅化之前,对三角形进行模糊处理,可以一定程度上缓解走样:
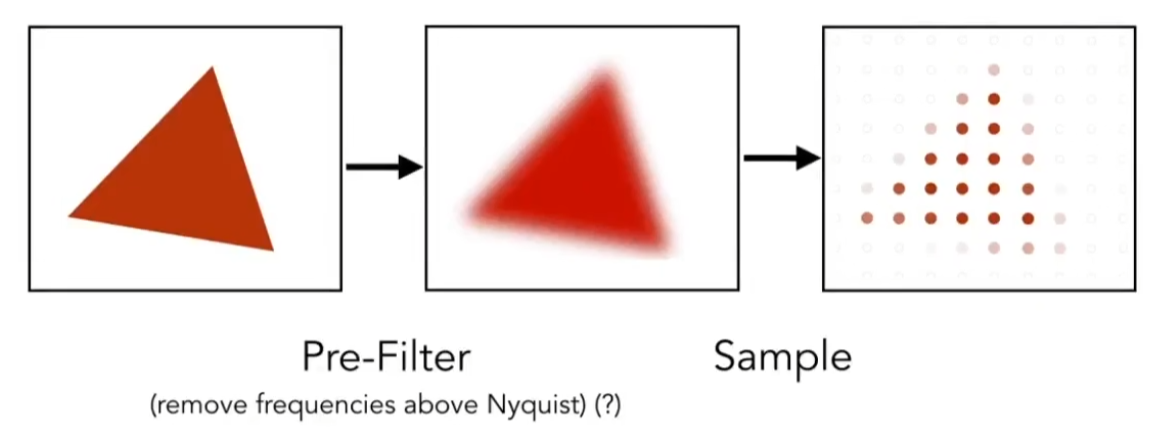
这类方法必须在采样之前做模糊。如果将顺序颠倒,则依然会出现走样的情况,此时的走样被称为模糊走样(Blurred Aliasing)。
频域
对于余弦函数,称为该函数的频率(Frequency),称为该函数的周期。
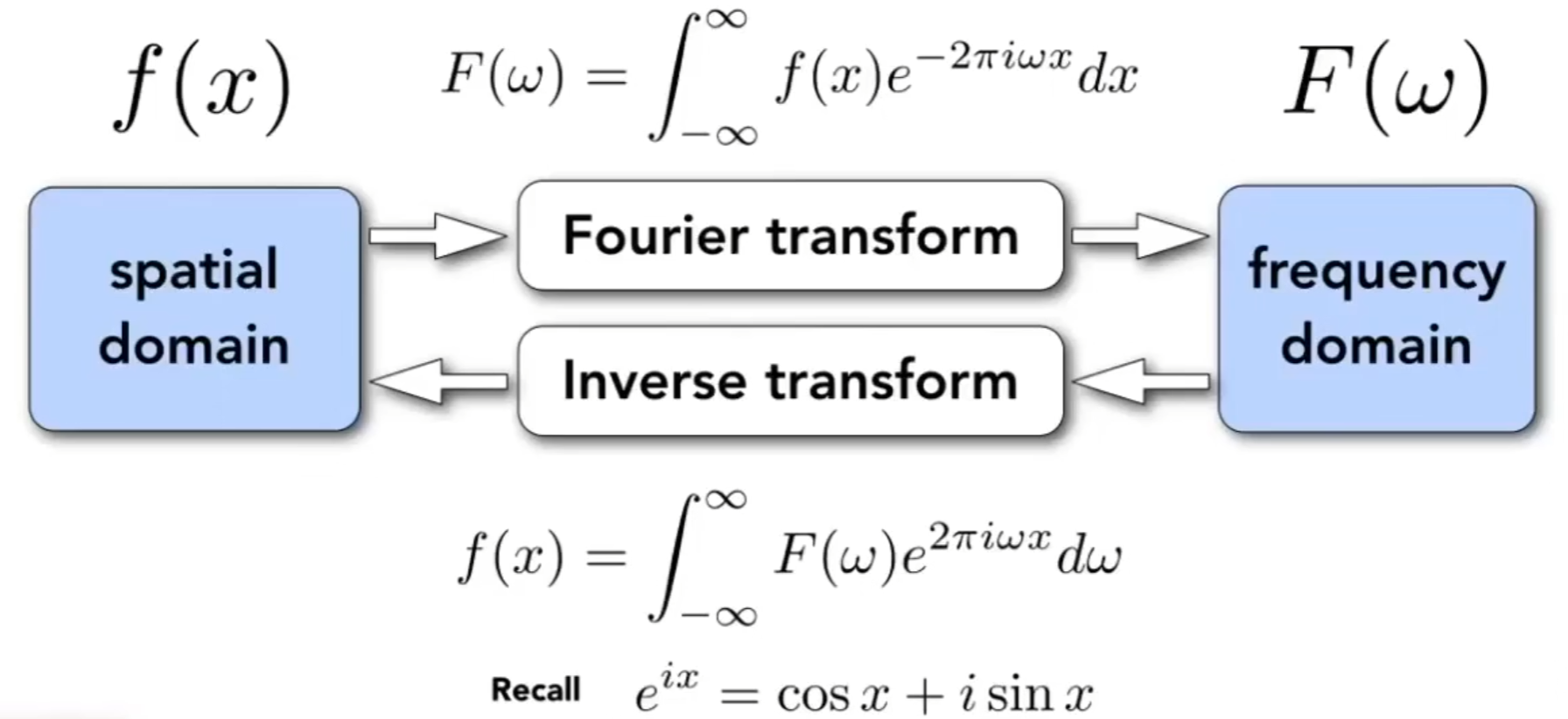
傅里叶变换(Flourier Transform)表示能将满足一定条件的某个函数表示成三角函数(正弦和/或余弦函数)或者它们的积分的线性组合。其本质是把一个函数分解为不同的频率。
走样的本质是:采样两个频率完全不同的函数,得到的是相同的结果。
滤波(Filtering)指将特定频率的信号过滤掉。
图像在时域中表示为像素的二维矩阵,其中每个元素代表图像中某个点的亮度或颜色。时域中可以直观地看到图像的细节,例如物体的形状、边缘等。频域表示的是图像中不同频率的成分。傅里叶变换将时域中的每个像素值重新表示为一组频率的组合。频率指的是图像灰度或颜色变化的快慢,低频表示图像中的大范围平滑变化(如均匀的区域),高频表示快速变化的部分(如边缘、细节等)。
高通滤波器(High-Pass Filter)指能将图像中高频(颜色变化较快)的部分滤出的滤波器。它可以提取出图像的边界。
低通滤波器(Low-Pass Filter)能将图像中低频(颜色变化平缓)的部分滤出的滤波器,它可以将图像的边缘模糊。
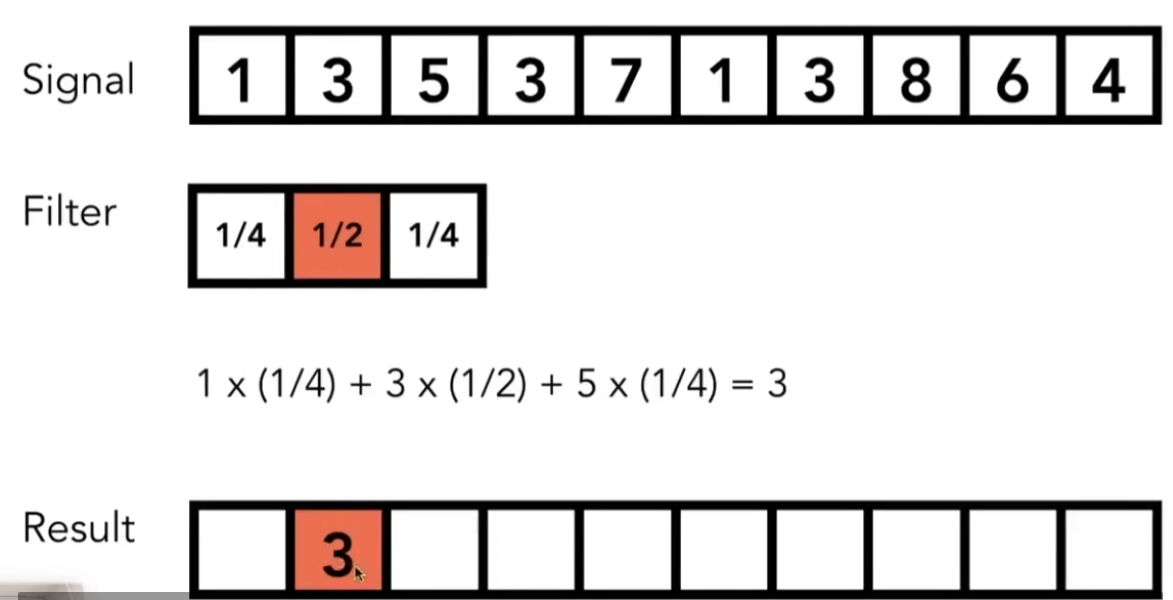
卷积
在图形学领域,过滤=卷积=平均。
何为卷积?
在移动滑动窗口的过程中,将窗口内的值与窗口覆盖的原始信号的值做点乘:
反走样技术
- 增加采样率,提高屏幕分辨率、传感器精度、帧缓冲数量等
- 在采样之前对信号进行低通滤波,在图像处理方面表现为对图像进行卷积平均
着色
着色(Shading)指对物体应用材质的过程。
Blinn-Phong反射模型
漫反射
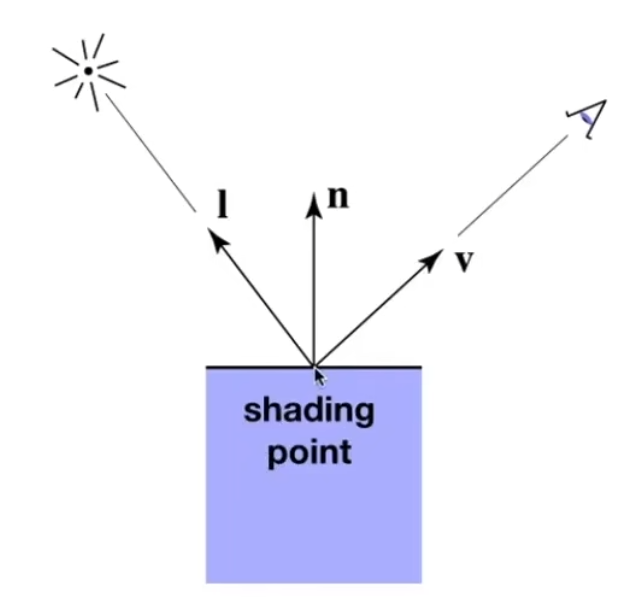
对于漫反射(Diffuse)光,光照向量I与法向量n的夹角越小,着色点接收到的光照能量就越大,漫反射光就越强(Lambert定律)。
对于点光源,假设距离光源中心1单位的点的光强为I,则距离光源中心r单位的点的光强为I/r^2。因此,我们可以写出漫反射光分量强度:
L_d = k_d(\frac{I}{r^2})max(0,\symbf{n\ ·\ l})
其中,为漫反射颜色系数,为光源强度,为法向量,为光照方向。
镜面反射
对于镜面反射(Specular)光,视角方向越接近镜面反射光,就越亮。
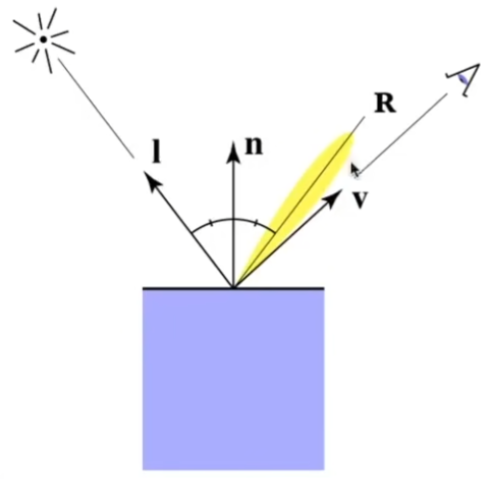
我们可以发现,当视角方向越接近镜面反射光时,半程向量(Half Vector,光照方向和视角方向的平分向量)就越接近法向量。即:
L_s = k_s(I/r^2)max(0,cos\alpha)^p = k_s(I/r^2)max(0,\symbf{n · h})^p
其中\symbf{h}为半程向量,;为反射度,越大则镜面反射范围越小,一般用100-200。
使用半程向量是因为,比起计算反射方向,半程向量的计算量小得多。同时,使用半程向量也能确保拥有镜面反射的着色点会更多,不会出现明显的断层现象。
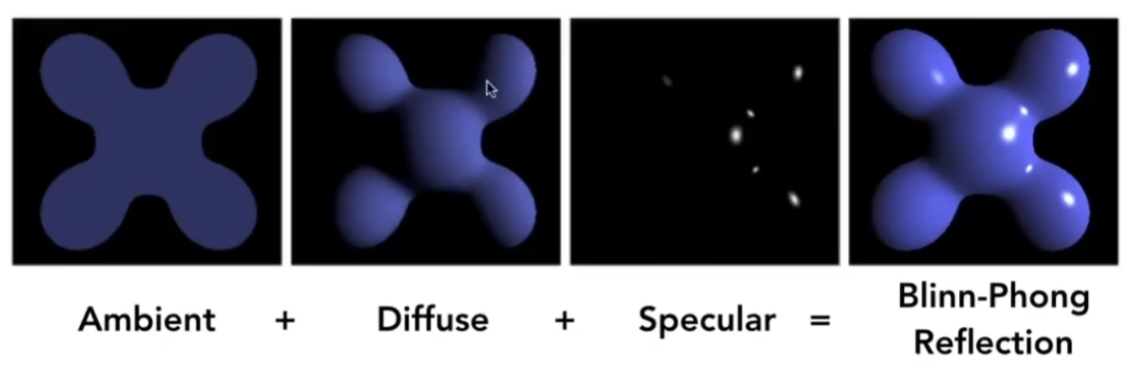
环境光
对于环境(Ambient)光,在Blinn-Phong模型中,我们认为每一点的环境光都相同:
将三个光照分量组合,即可得到完整的光照:
着色频率
着色频率(Shading Frequencies)指在图形渲染过程中,着色操作执行的频率。着色频率决定了着色的精细程度和计算资源的消耗。
常见的着色频率包括:
- 逐面着色(Flat Shading) - 每个三角形只有一个法向量,对于平滑曲面效果不佳。
- 逐顶点着色(Gouraud Shading) - 每个顶点有一个法向量。
- 逐像素着色(Phong Shading)。
当模型的顶点数增多时,三种着色频率最终的输出差异会越来越小。当顶点数增大到某种程度时,Flat Shading/Gouraud Shading的计算量甚至会超过Phong Shading.
我们知道,每个顶点都会与多个三角形有关。因此,在Gouraud Shading中,每个顶点的法线通过对周围三角形的法线求平均获得:
一种优化方式是进行加权平均,以三角形的面积为权重。
在Phong Shading中,我们已知每个顶点的法线,通过重心插值法(Barycentric Interpolation)来获取每个片段的法线。
实时渲染管线
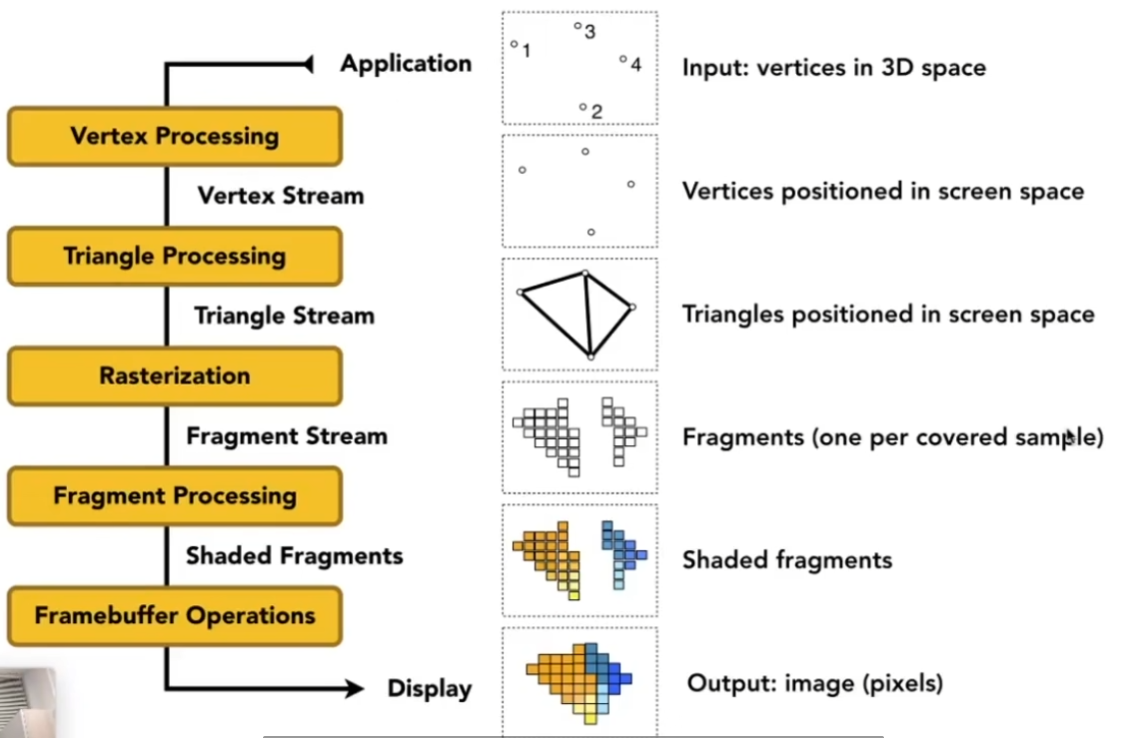
着色器程序
着色器(Shader)是对顶点和片段进行逐次处理的通用着色程序。
纹理映射
纹理映射(Texture Mapping)本质上用于定义每个片段的漫反射系数、深度值等基本属性。
纹理坐标(Texture Coordinates)用于将几何体上的三角形映射到纹理上。
UV的范围是[0,1]。
重心坐标
重心坐标(Barycentric Coordinates)用于三角形内部的插值。
对于三角形,顶点属性在三个顶点是确定的。但在实际着色中我们需要三角形上每个像素的属性,这些属性由顶点属性插值获取。
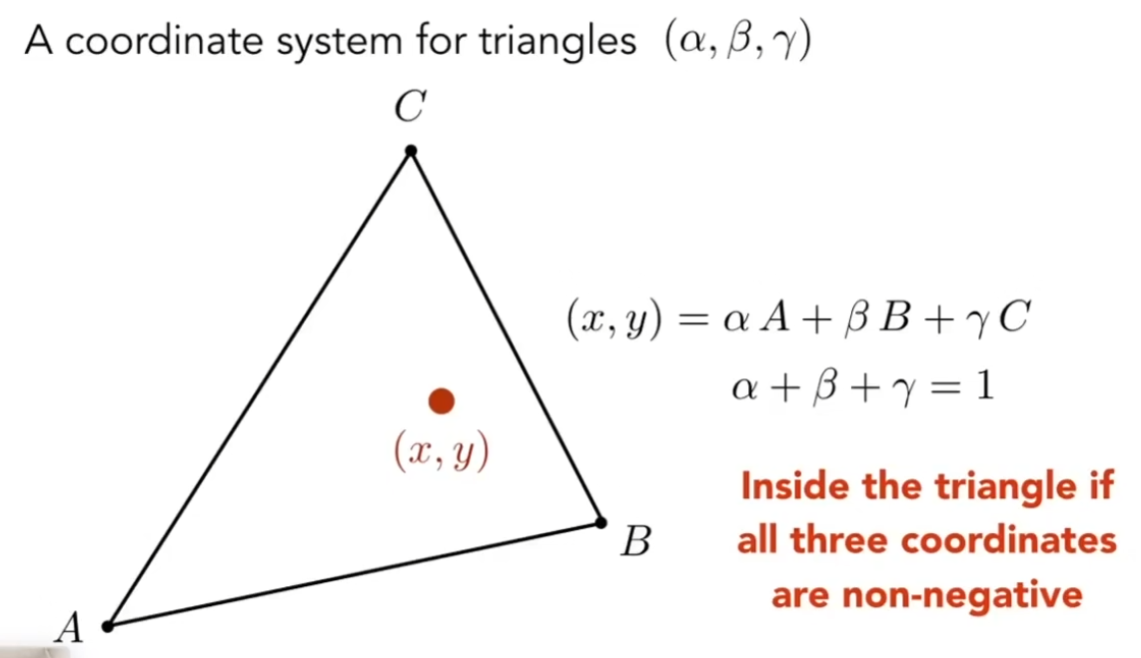
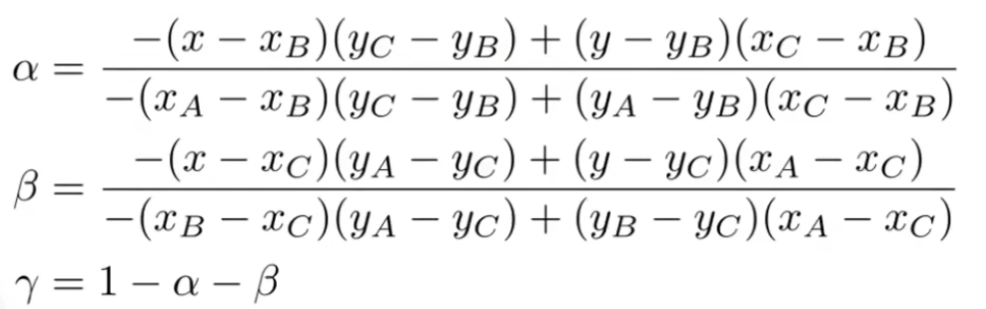
如图,式内A、B、C为三点的坐标。对于任意用A、B、C表示坐标的点,只要系数,并且三个系数均为正,则该点在三角形内。此外,的值也可以用三角形面积比值求出:
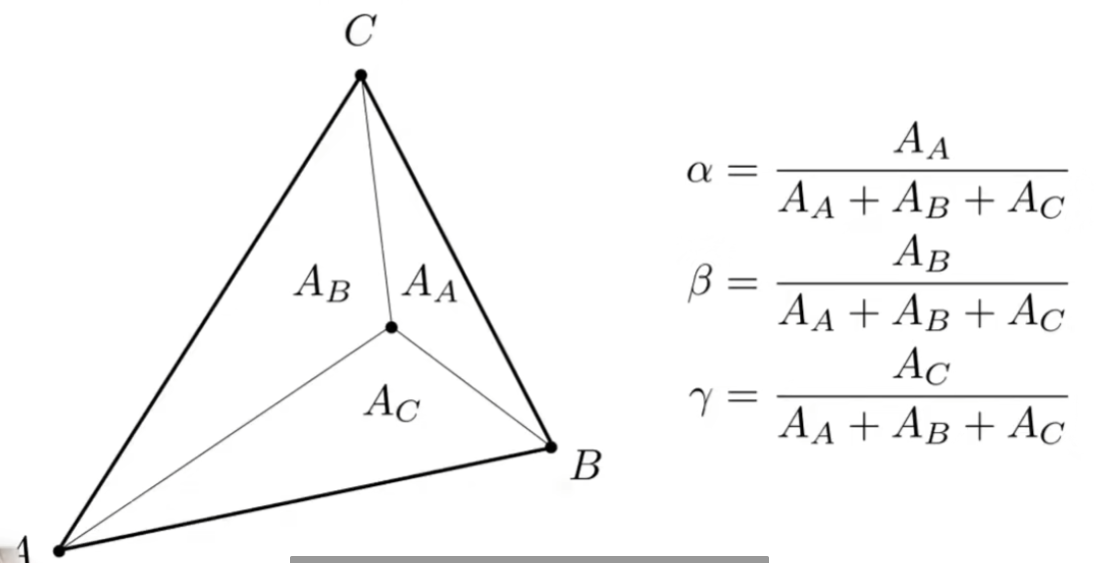
三角形的面积可以由叉乘公式求出,如,如果将该公式用具体坐标化简,可得:
对于该点,就是它的重心坐标,三个参数分别是该点对于点A、B、C的插值系数。例如,点A的颜色为a,点B的颜色为b,点C为c,则插值后该点的颜色就是
需要注意的是,重心坐标经过投影变换后会发生变化,因此,若需要插值三维坐标,则需要在投影前进行重心坐标计算。对于深度计算,则需要在投影后,对各像素对应的三角形顶点应用逆投影变换,然后插值得到深度。
应用纹理
将一个低分辨率纹理应用到高分辨率物体上,会出现多个屏幕像素(Pixel)对应纹理上同一个纹素(Texel)的情况。此时,就需要决定像素-纹素的映射方式。
-
Nearest方式直接将屏幕像素映射到最近的纹素上。
-
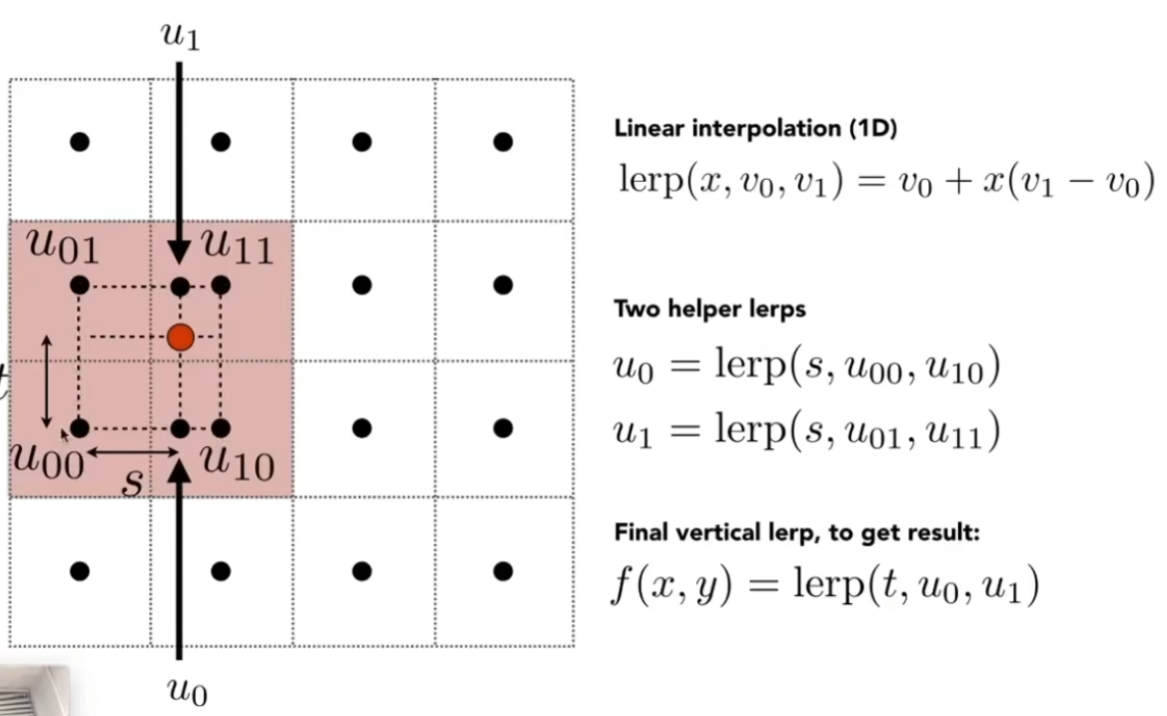
Bilinear方式:使用双线性插值(Bilinear Interpolation),该方法寻找邻近的四个纹素,将四个纹素的中心点框选出一个矩形,并以采样点到左边的距离s作为比例(s必定小于1,若大于1就会框选另外的纹素了),分别对上面的两个纹素和下面的两个纹素进行线性插值,得到两个颜色值。随后,以采样点到下面的距离t作为比例,对先前得到的两个颜色值进行插值:
- Bicubic方式:使用双三次插值,寻找周围的十六个纹素,每次使用四个纹素坐标进行插值。
相对地,将大纹理应用到小平面,当一个像素远大于纹素时,会出现摩尔纹,因为采样时可能会跳过一些纹素。
一种解决方法是提高采样频率,但开销过大。
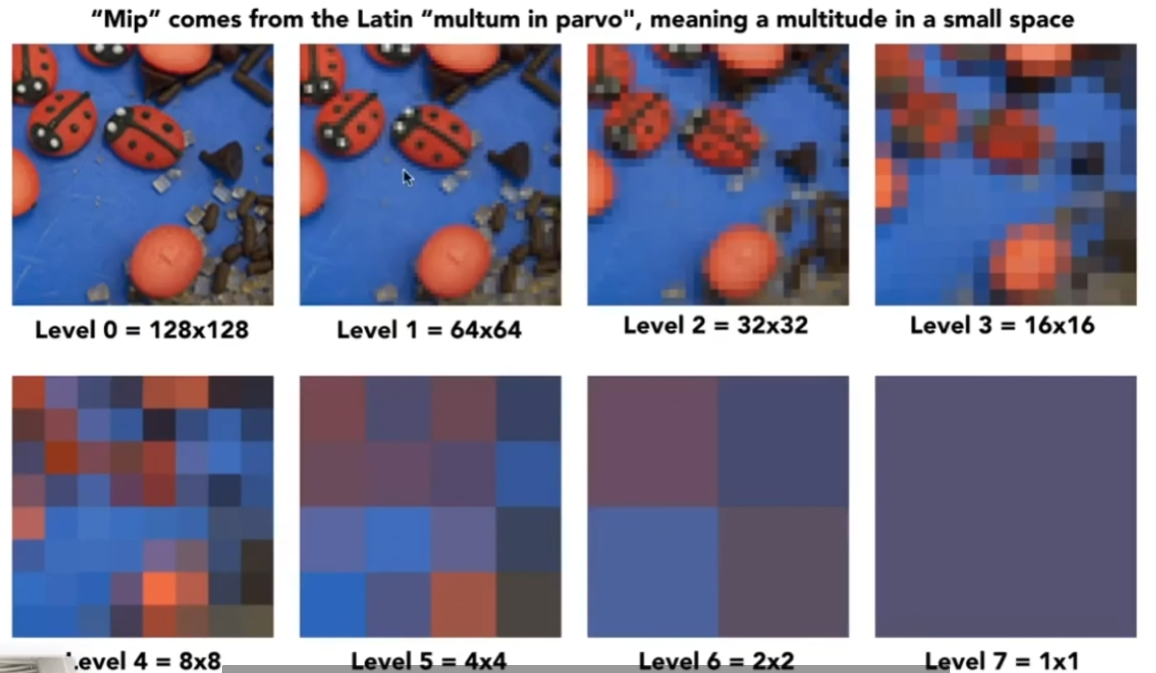
另一种方法是避免采样,对纹理进行预处理,使其处于不同的远近层次时,具有不同的细节层次。三角形越远,则纹理越模糊(越多的纹素被取平均值)。这种技术被称为多级渐远纹理(Mipmap)。
Mipmap是一种快、近似、仅适用于正方形的范围查询方式。一个纹理可以生成若干个Level的Mipmap,Level越高,Mipmap的分辨率越小。
如何计算纹理的大小?
取光栅化后三角形上两个相邻的点P1、P2,比较这两个点之间的距离和UV坐标之间的距离。
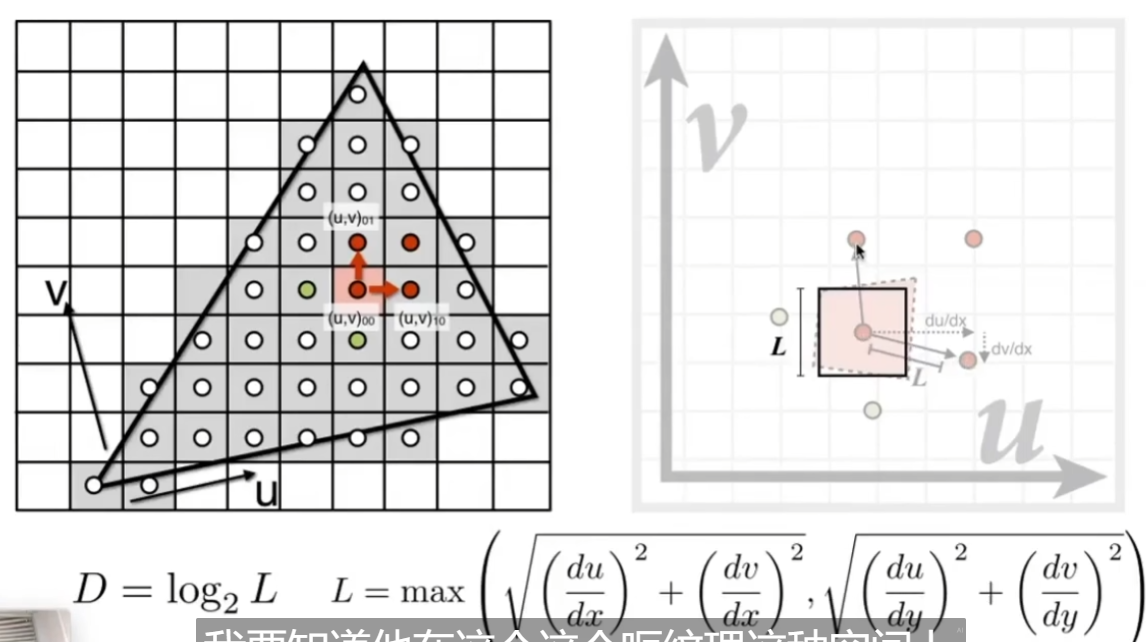
完成比较后,我们便能得到,一个像素在纹理上放大后约等于多少纹素。在上图中,一个纹素=2*2像素,我们便可以选取Level 1级别的Mipmap进行采样。
但是,不同级别的Mipmap如果简单过渡的话,会出现断层问题。因此,我们对Mipmap也可以采用三线性插值:
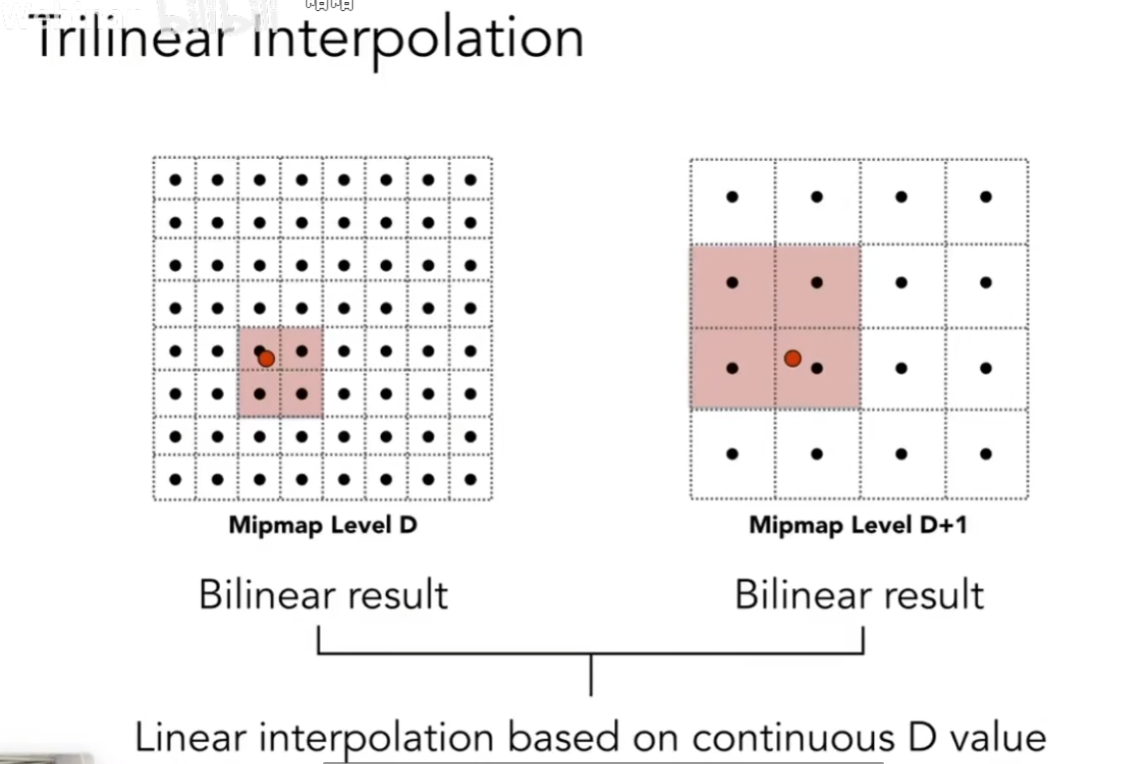
在层内部使用双线性,在不同层之间使用单次线性插值,共计三次线性插值。
Mipmap的缺点之一是,它会将远处的几何体纹理的细节过度模糊(Over blurred),这是由Mipmap各级的颜色平均操作和三线性插值的近似性引起的。
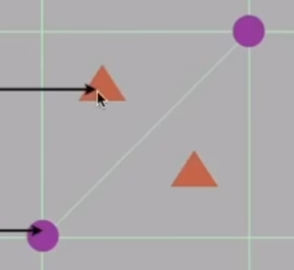
我们在计算像素/纹素比例时,会将纹理在屏幕上一个像素内部的显示区域近似为一个正方形。但实际上,在视角变化时,可能会难以近似。例如:
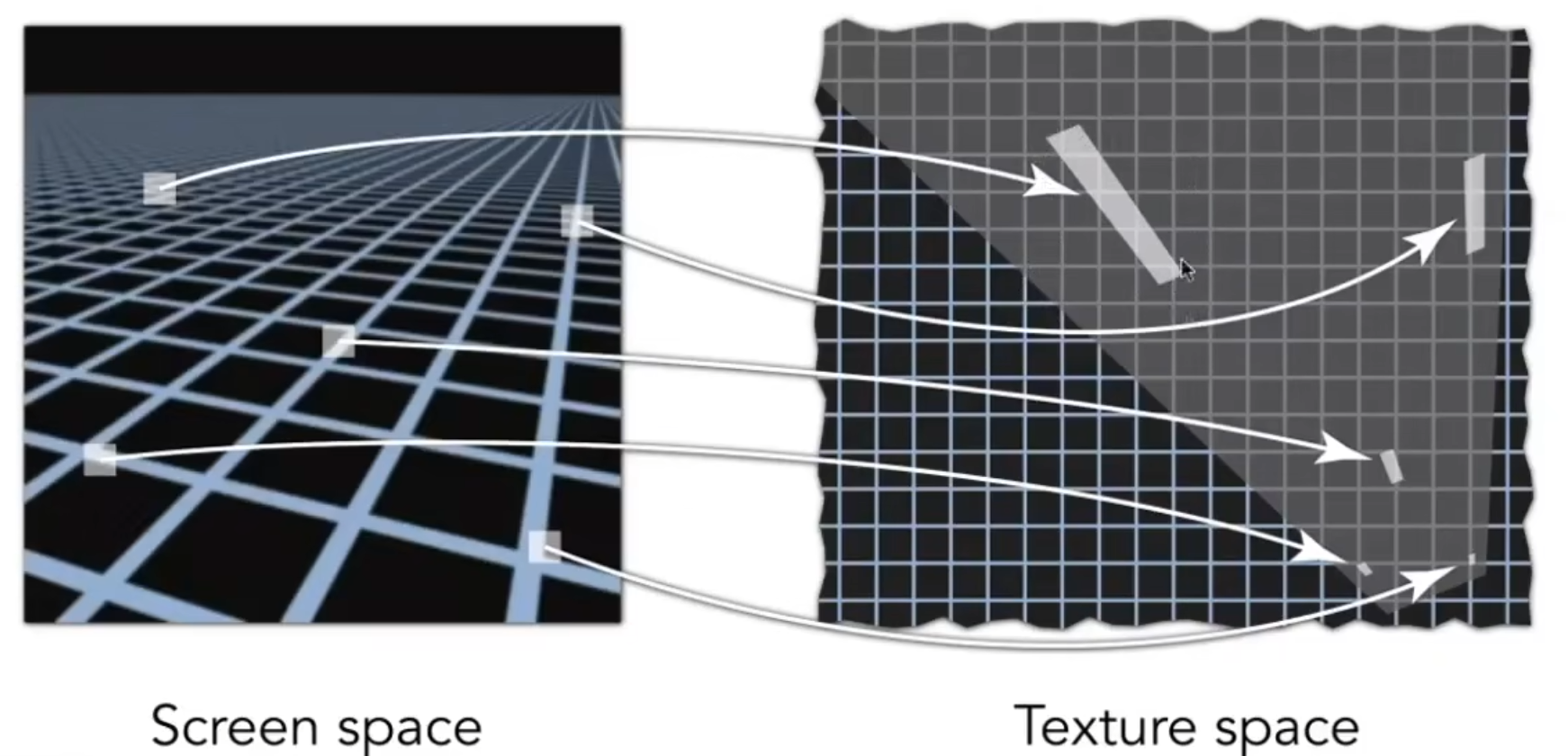
此时,如果想用一个正方形把拉长的四边形框住,就会框住更大的区域,把更多的颜色平均,导致模糊。
各向异性过滤(Anisotropic Filtering)用于解决Mipmap的这一缺点,在生成正方形Mipmap时同时生成长宽比不同的压缩纹理(被称为Ripmap)。这种方式效果比Mipmap好,但会生成更多的次级纹理,占用更多的显存。Nx各向异性过滤表示生成到 Level的压缩纹理。如图:

对于映射后呈长条形的纹理区域,可以查询长宽比不同的压缩纹理。但如果纹理区域又长又斜的话,就不太能框住。EWA过滤解决了这一问题,它将不规则的区域拆分成规则区域做多次查询,但计算量大。
纹理应用
环境贴图
环境贴图(Environment Map)用于描述环境光分量。它假设环境光仅包含方向信息,都来自无限远处。

球形环境贴图(Spherical Environment Map)将环境贴图以球体贴图的形式保存,环境光分量被记录在球上。
 、
、
但是,这类贴图展开后会导致上下两边变形。为了解决这一问题,我们引入立方体贴图(Cube Map)。
立方体贴图
每个Cube Map由六张正方形贴图组成。采样Cube Map时,需要先判断方向向量在立方体的哪个面上,再对那个面进行采样。
凹凸贴图
凹凸贴图(Bump Mapping)用于在不添加三角形的情况下为表面添加更多细节。
凹凸贴图定义了不同位置的高度,在光照计算中,通过计算邻近的高度差来重新计算法线。
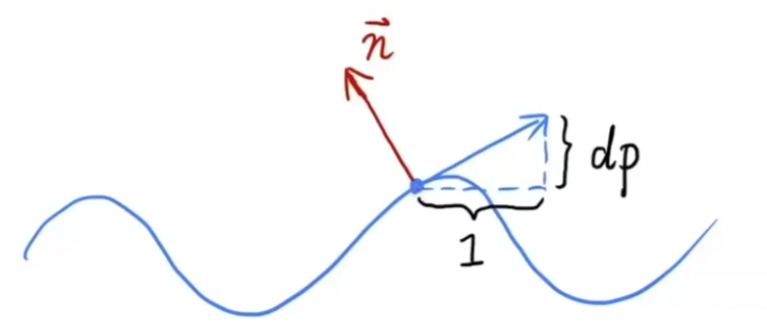
如图,要计算法线,就需要知道点P处的切线。假设两个相邻的点,距离1,它们的高度差为h(p+1)和h(p),则切线斜率为h(p+1)-h(p)。法线垂直于切线,将切线旋转90度即可得到法线。
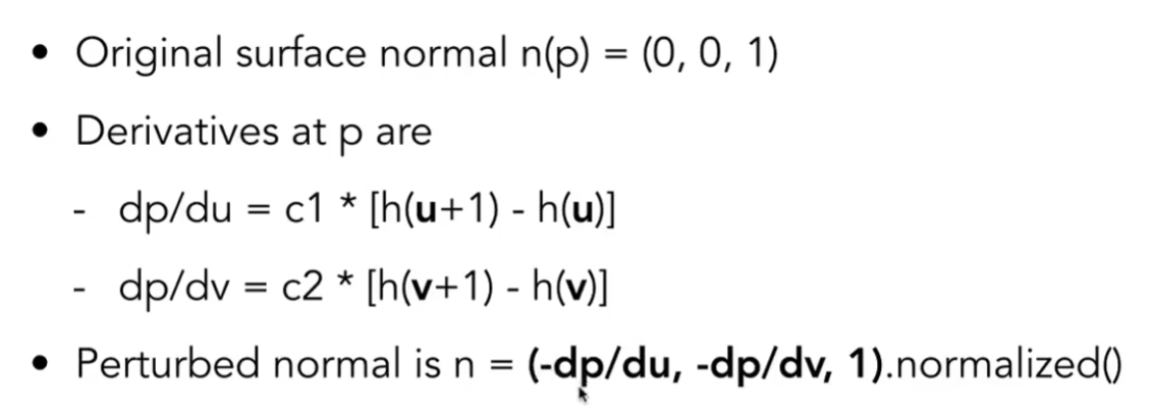
在三维空间中,我们可以分别求u、v两个方向的切线,即可得到法线:
位移贴图
位移贴图(Displacement Mapping)存储了顶点的偏移信息。使用位移贴图时,顶点确实被位移了,因此,该类贴图只适合顶点较多的模型。
阴影
最常见的产生阴影的技术是阴影映射(Shadow Mapping)。
关键思想:不在阴影内的片段必定能被从光源视角和相机视角被“看到”(即未被遮挡)。
进行阴影映射的步骤:
- 从光源位置出发,生成一张深度图。
- 从相机视角正常渲染。
- 将相机视角观察到的顶点重新投影到光源视角,对深度图进行采样。若该顶点在光源空间内的深度大于采样到的深度,则该点位于阴影内。
阴影映射技术只能生成硬阴影,即边缘非常锐利的阴影。软阴影效果更好,它在物体根部较为锐利,在物体上部较为模糊。软阴影的本质上是物理中的半影,是由于光源(有一定大小)被部分遮挡而导致的。
几何
显隐式几何
图形学中,几何可分为隐式(Implicit)几何和显式(Explicit)几何。
隐式几何仅表明点之间的特定关系,如使用表示的球面。一般地,我们定义:对于点,只要其满足,则认为该点在函数所表示的表面上。
除了解析式外,还有:
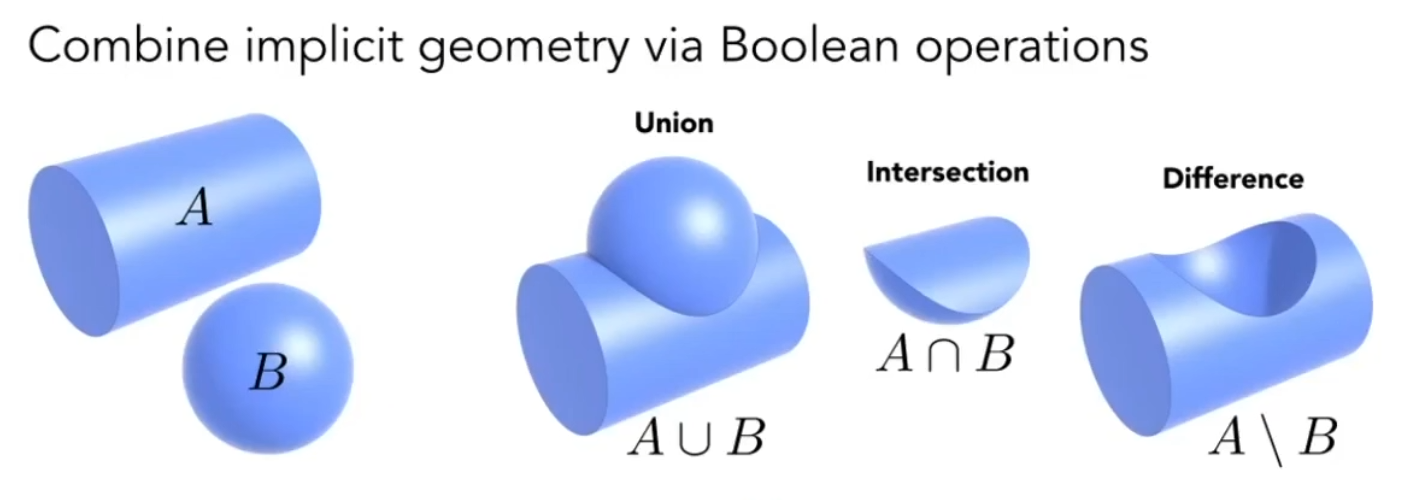
- 构造立体几何(Constructive Solid Geometry,CSG),使用基本几何体的集合运算构造复杂几何体:
- 距离函数(Distance Functions),不直接描述点,而是描述某处到集合表面的最近距离(有符号,外面为正,内部为负)。
- 分形(Fractals),自相似。
对于隐式几何,想要从解析式判断其形状较为困难,但判断一个点是否在表面上非常简单。
显式几何会给出所有点的坐标,或通过参数映射的方式定义表面。
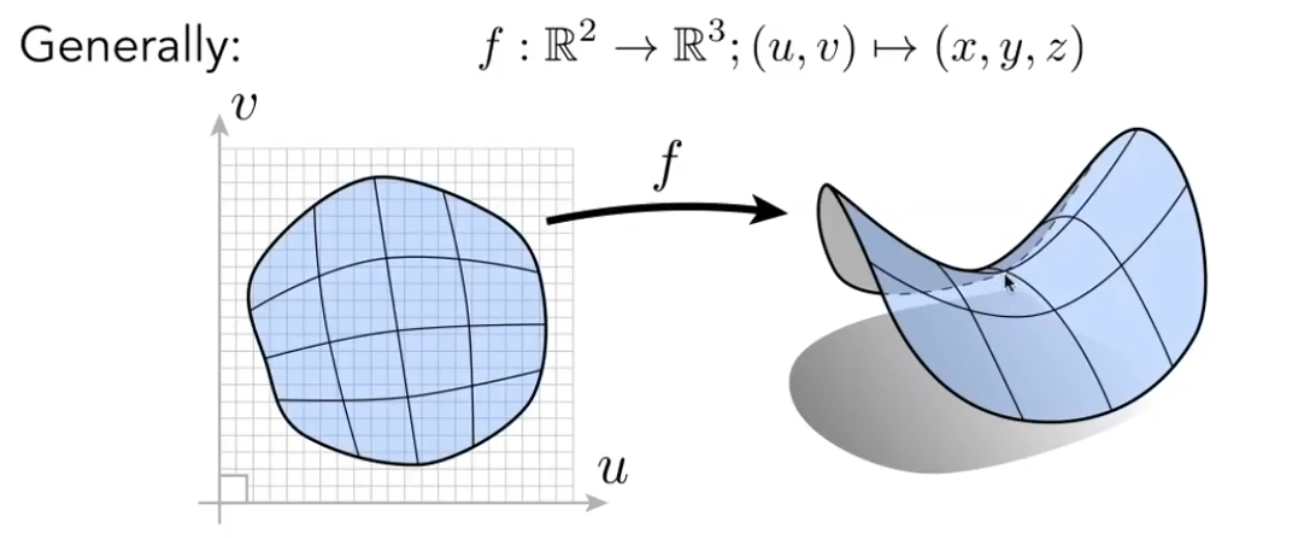
如图,对于参数映射类的显式几何,一般会给出类似于下面的表达式:
该表达式便定义了一个曲面。通过获取几何体的u、v坐标(已知),即可得到其三维空间坐标。
对于显式几何,想要判断点是否在表面内是非常困难的。
除此之外,常见的显式几何还有:
- 点云(Point Cloud),给出一系列点的三维坐标
- 没有点之间的关系,所以要表示三维几何体需要很多密集的点
- 在三维扫描与重建中较为常用
- 对于大型数据集非常实用
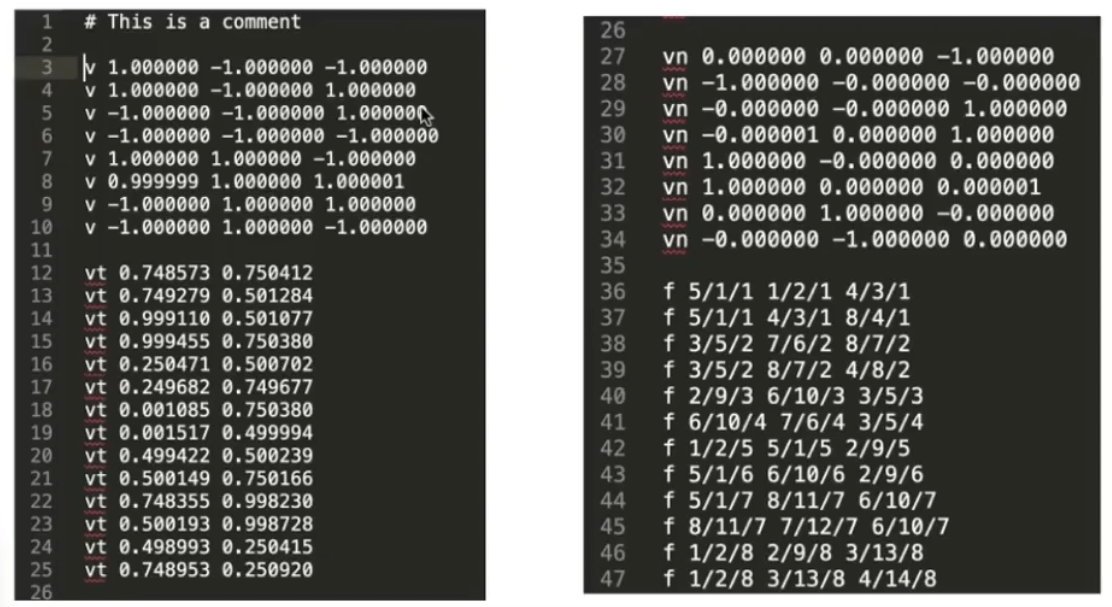
- 多边形网格(Polygon Mesh),给出顶点坐标和多边形(以索引的方式)
- 图形学中最广泛应用
以Wavefront Object File(.obj)格式为例,是一类文本文件,将顶点坐标、法线、纹理坐标和各属性之间的关系等写入文件。
曲线
贝塞尔曲线
贝塞尔曲线(Bezier Curve)用一系列控制点定义一个曲线。
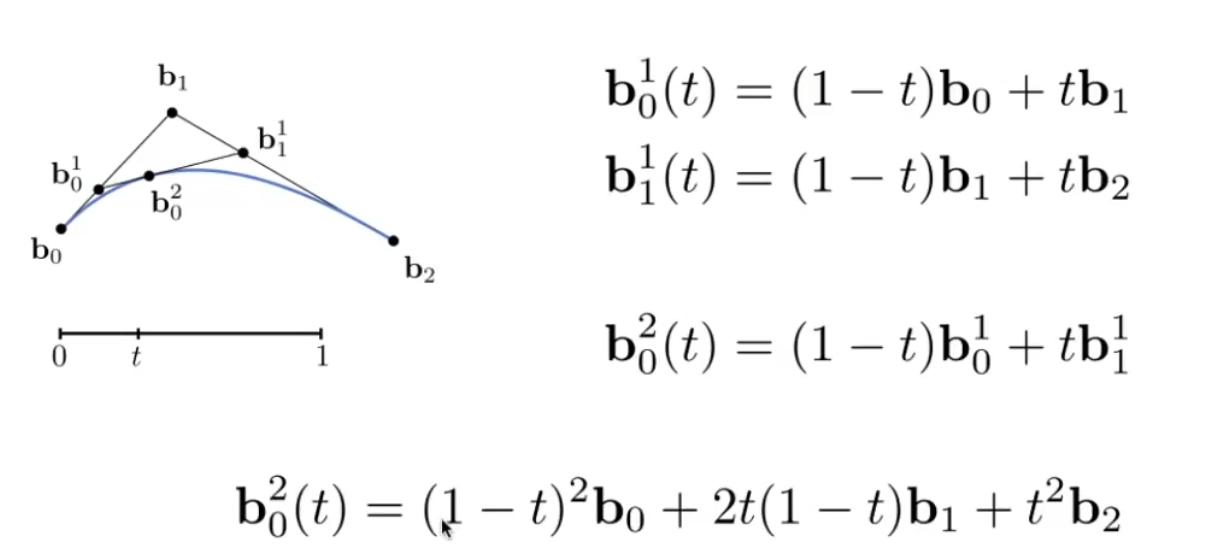
对于三个控制点的情况,可以画出二次贝塞尔(Quadratic Bezier)曲线。
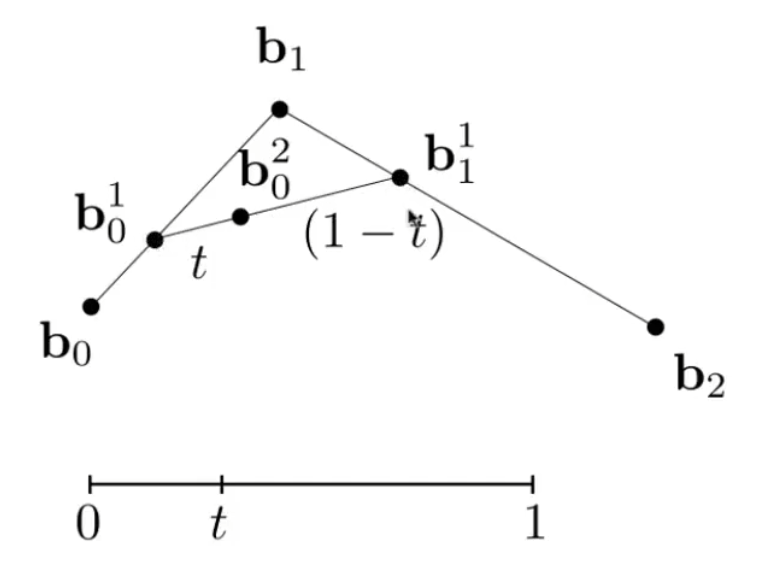
如图,假设时间=t时,线段上有点(其与b0距离占总线段的t),线段上有点(其与b1距离占总线段t),而线段上有点(其与距离占总线段长的t),则在t时刻,点在贝塞尔曲线上。将t从0遍历到1,就可以画出贝塞尔曲线。
对于四个控制点的情况,存在三个线段,分别找出各个线段上到对应点距离比例为t的点,即可转换到三个控制点的情况。
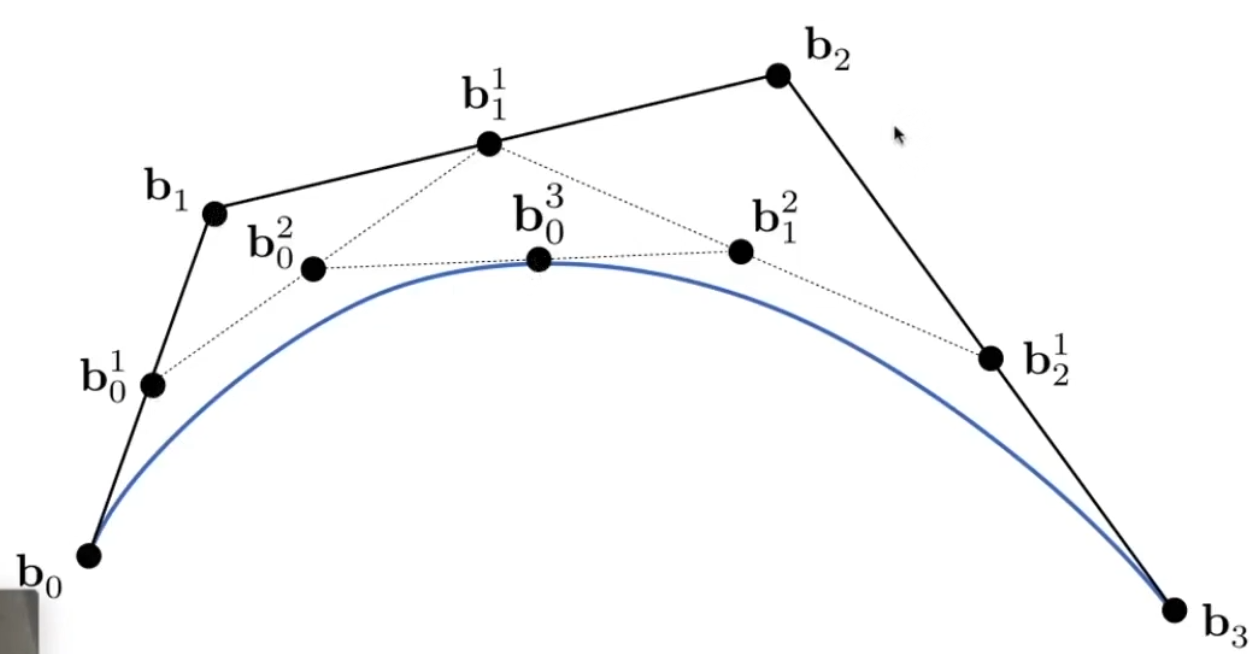
对于更多控制点的情况,也是类似,层层递归。我们可以把这个过程写成代数公式:
其中,B被称为伯恩斯坦多项式(Bernstein Polynomial),其值为:
例如,我们要求三个控制点的贝塞尔曲线解析式:
贝塞尔曲线有如下性质:
- 曲线在t=0时必定在起点,在t=1时必定在终点
- 顶点的相对位置相同(前后经历了仿射变换),则画出来的贝塞尔曲线的形态完全相同。
- 贝塞尔曲线必定位于控制点形成的凸包(Convex Hull)内。凸包指若干个点形成的最小凸多边形。
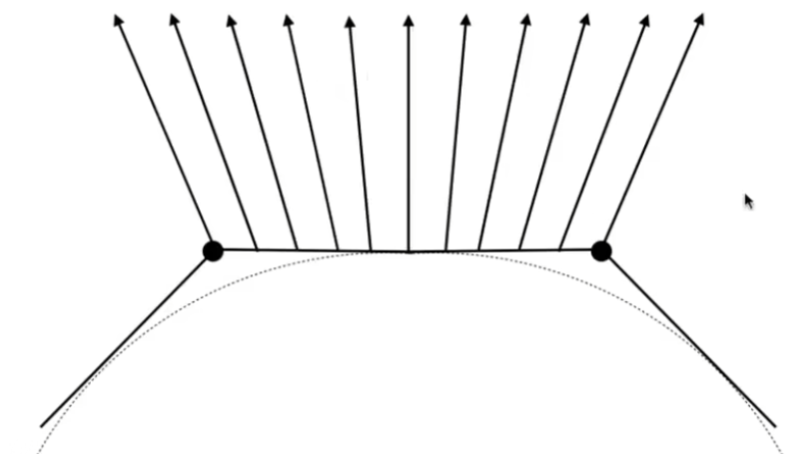
逐段贝塞尔曲线
当控制点增多时,调整单个控制点很难让曲线变成开发者想要的形态。为了解决这一问题,我们可以逐段地定义贝塞尔曲线,并将它们首尾相连。该技术被称为逐段贝塞尔曲线(Piecewise Bezier Curves)。
对于每段曲线,我们均使用四个控制点,即三次贝塞尔曲线。
该方法有非常广泛的应用,如Photoshop中的钢笔工具。
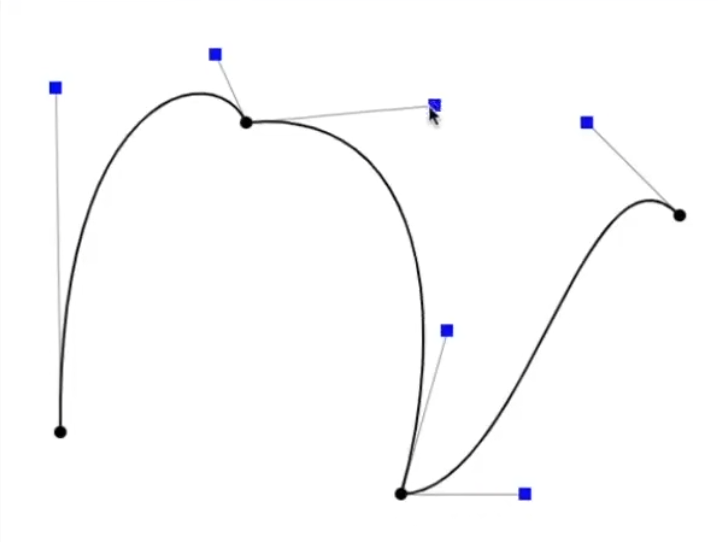
若要让过度点处的曲线光滑无转折,将两个手柄拉到共线且等距即可。
连续性
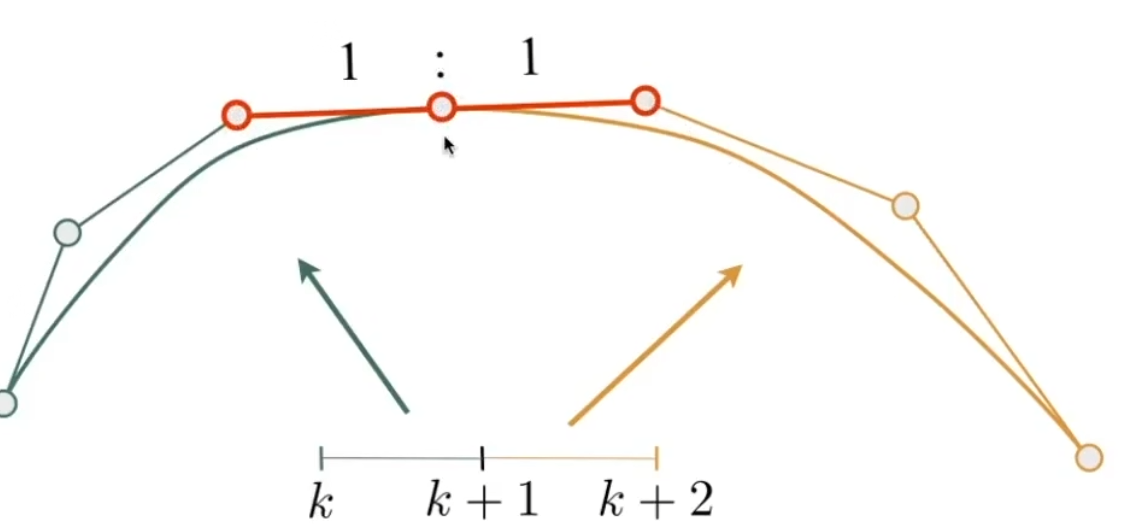
当一个曲线的终点是第二个曲线的起点时,我们称这两个曲线为C0连续(C0 Continuity)。
当两个曲线满足C0连续时,若连续点的两个“手柄”共线且等距,即时,我们称这两个曲线为C1连续。
a代表曲线a,a_n代表曲线a的第n个点,即终点;b代表曲线b,b_0代表曲线b的起点。
样条曲线
样条曲线(Spline)是通过一组给定点生成的平滑连续曲线。曲线的形态由控制点控制。
B-样条曲线(B-Spline)比起贝塞尔曲线需要更多的信息,它可以满足更多的需求,能对曲线有更精细的控制。这类曲线具有局部性,可以知道每个控制点对曲线的影响范围。
曲面
贝塞尔曲面
贝塞尔曲面(Bezier Surface)是对二维空间中两个方向分别应用贝塞尔曲线,然后进行双线性插值得到的。
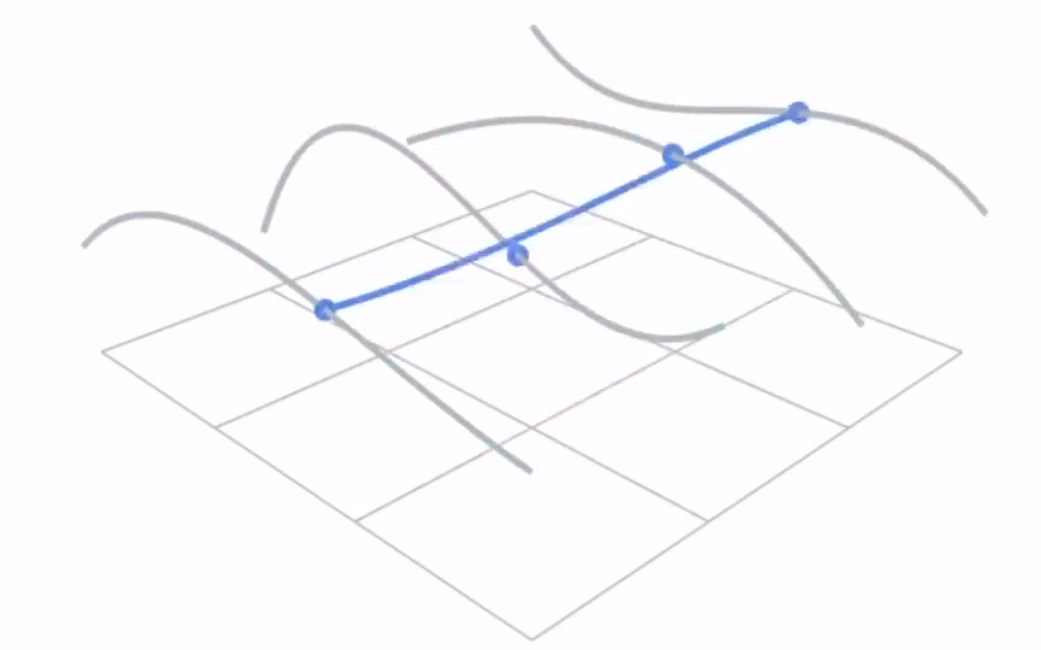
如图,我们首先定义四个横向贝塞尔曲线,然后标记处四个曲线上相同横坐标的点,将它们作为纵向贝塞尔曲线的四个控制点,这样就绘制出了一条纵向曲线。在横坐标不断变化的过程中,这条曲线会扫描出一个面,这个面就是贝塞尔曲面。
网格
对于网格(Mesh),一般存在细分(Subdivision)、简化(Simplification)、规范化(Regularization)三种操作。
细分
细分操作用于增加三角形数量,使得曲面更加光滑,表面有更多细节。
细分分为两步:首先将一个三角形分出更多小三角形,然后移动顶点位置,使模型更光滑。
Loop细分
最简单的细分操作为Loop细分。该方法仅适用于三角形网格。将三角形三条边的中点相连接,即可得到四个小三角形。对于新顶点(原先的中点)和老顶点,有不同的规则进行顶点位置的改变:
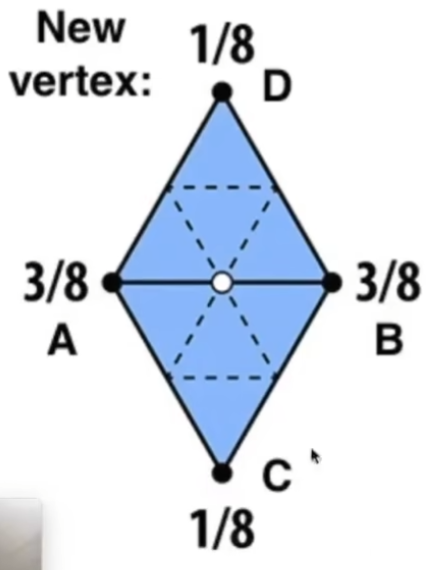
如图,对于新顶点,它一般情况下位于一条边上并且被若干小三角形共享。我们把同时含有新旧顶点的小三角形的旧顶点称为A、B,否则称为C、D,则新顶点的位置应当被更新为3/8*(A+B)+1/8*(C+D)。
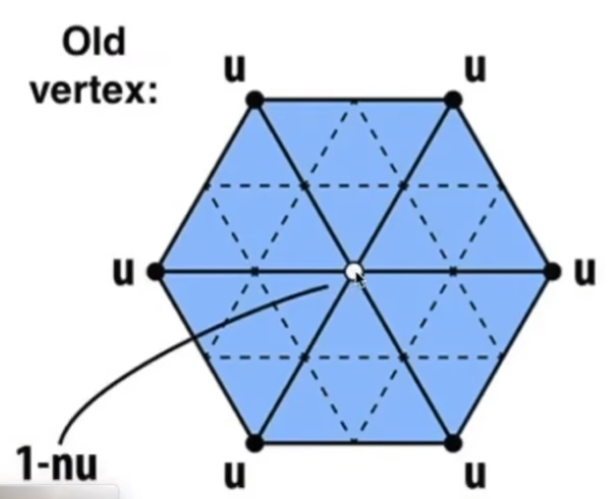
对于旧顶点,一部分位置不变,另一部分按以下规则变化:
一个顶点所连接的边的数量被称为顶点的度(Degree),记为n。定义数量u,当n=3时,u=3/16;其他情况下,u=3/(8n)。则旧顶点的位置更新为:(1-n*u)*原位置+u*相邻顶点位置和。
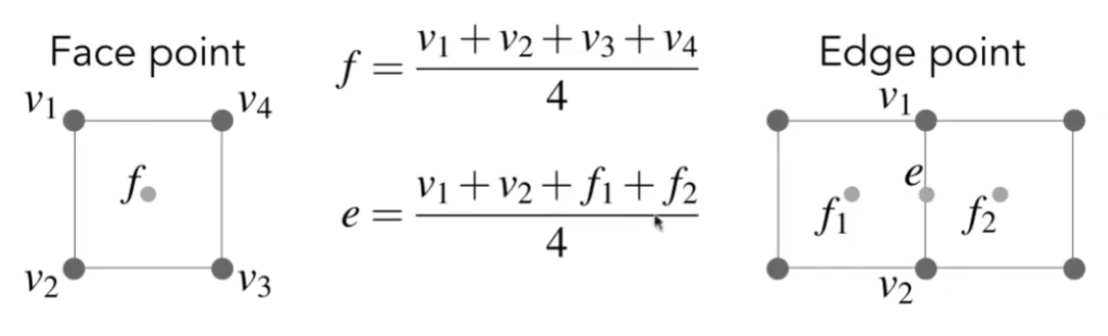
Catmull-Clark细分
Catmull-Clark细分适用于任意形状的网格。
首先定义,在网格中存在两类面:四边形面(Quad Face)和非四边形面(Non-Quad Face)。其次,定义度不为4的点均为奇异点(Extraordinary Vertex)。
对于每个边,我们取其中点;对于每个面内部我们同样取一个点(可以是重心),然后将边上中点和面上的点相连,完成新顶点的生成:
随后,我们可以发现,只要是在非四边形面内取的点,在连接后均为奇异点(因为它要和非四边形的每条边相连,度必定不为4)。并且,在完成连接后,新增了(原本非四边形面个数)个奇异点,且目前已经不存在非四边形面了。我们可以认为,该过程将非四边形面规范化为四边形面的同时,总会引入一个奇异点。
我们可以总结:第一次Catmull-Clark细分会将所有非四边形面转换为四边形面。在之后的细分步骤中,奇异点数不会增加。
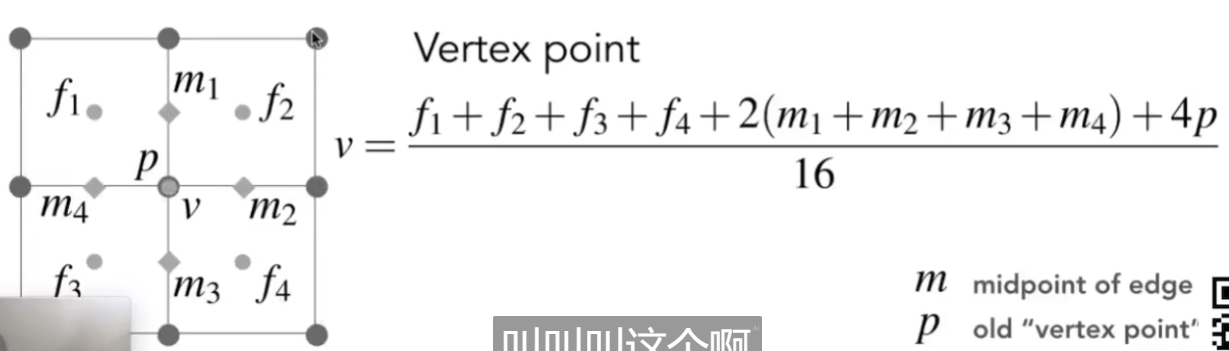
接下来进入更新顶点位置步骤:
首先考虑新取的点——
对于四边形面内取的点,其新位置为:
对于四边形边上取的点,其新位置为:
对于旧顶点,其新位置为:
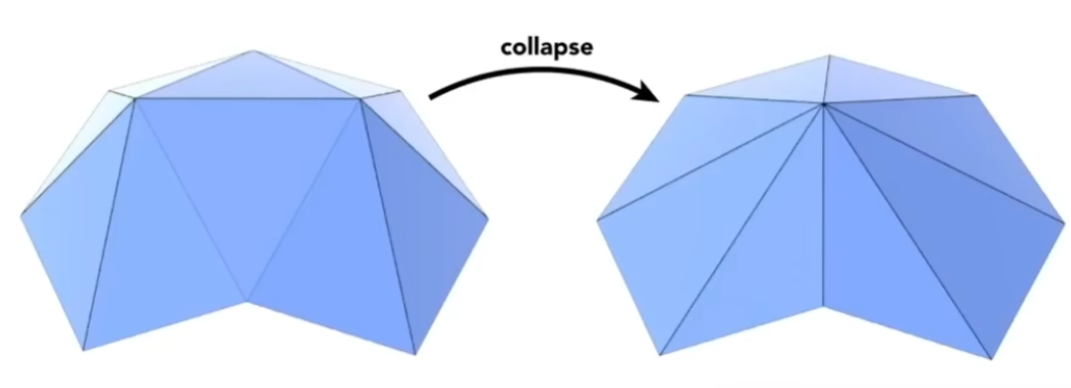
简化
简化操作用于在保持原有形态不变的情况下减少三角形数量,优化渲染性能。
边坍缩(Edge Collapsing)法:找到一条边,将边的两个顶点合并为一个顶点。
实际应用中,寻找需要坍缩的边比较困难。我们引入二次误差度量(Quadric Error Metrics):
二次误差指:我们需要找到一个新顶点,使新顶点到原本的与新顶点关联的若干个面的距离的平方和最小。

结合边坍缩算法,在实际的简化操作中,程序将遍历每一条边,计算每一条边坍缩后的二次误差并记录。在实际坍缩时,从二次误差最小的边开始。
一个问题是,一个边坍缩后会引起其他边的变化,变化的边的二次误差需要重新计算。因此,需要一种数据结构,它既能快速地取到最小值,又能快速地以小代价更新元素。优先队列(堆)便具有这种特性。
规范化
规范化操作用于使网格中的三角形形状趋于一致,更加均匀。